VR IMU Breakout - VR module with IMU sensor - BNO086 - Qwiic - SparkFun SEN-22857
- Артикул:
- 122349165
Характеристики
Прочие свойства
- Бренд
- SparkFun
Описание
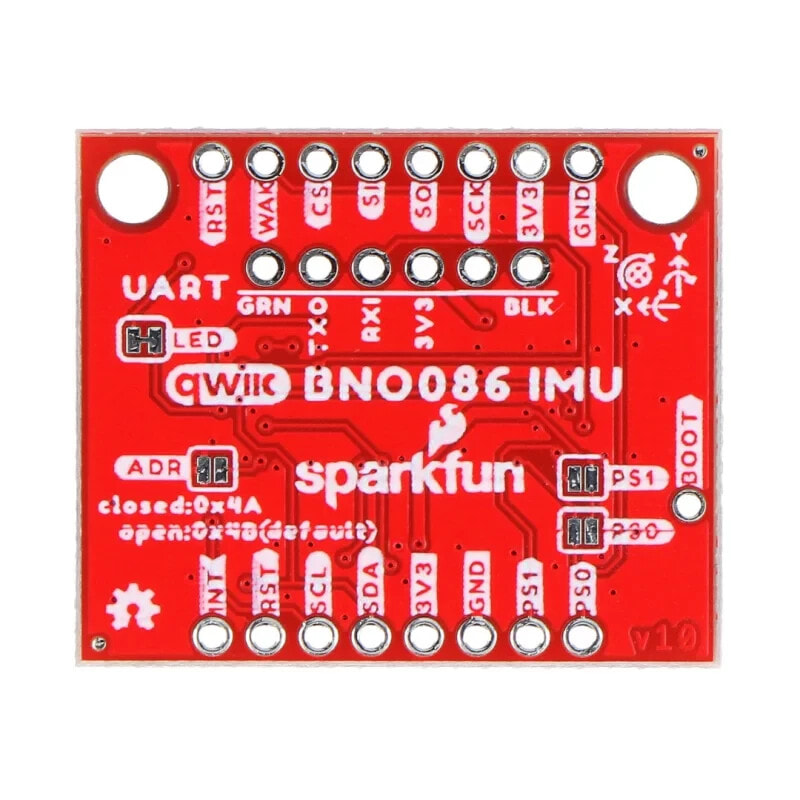
VR IMU Breakout from SparkFun is a module with an IMU sensor intended for use in the field of virtual reality (VR). It is equipped with an efficient BNO086 chip from CEVA, which is a combination of a 3-axis accelerometer , gyroscope and magnetometer (SiP), and also contains a 32-bit processor with an ARM Cortex M0+ core . The module generates highly accurate indications of rotation vectors, GRV rotation and geomagnetic rotation, so it can be used for smooth and precise motion tracking. All data collected by the sensor is combined and corrected for drift, ensuring measurement stability and eliminating the risk of errors. VR IMU Breakout is an ideal solution for applications that require orientation or motion detection because it provides the user with a highly realistic virtual reality experience.
Before you start working with VR IMU Breakout, be sure to check the user guide prepared by the manufacturer!
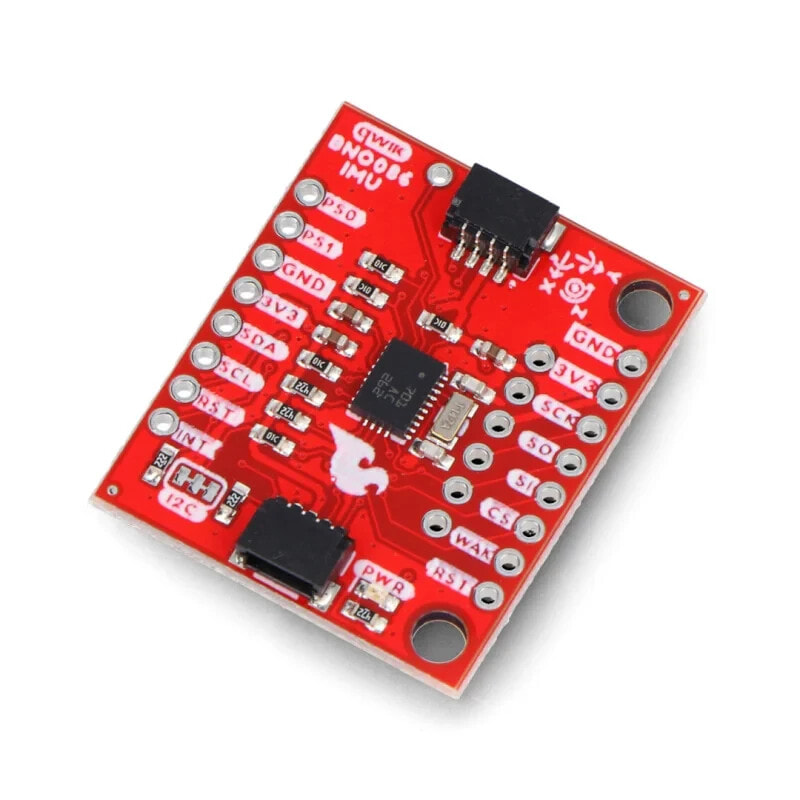
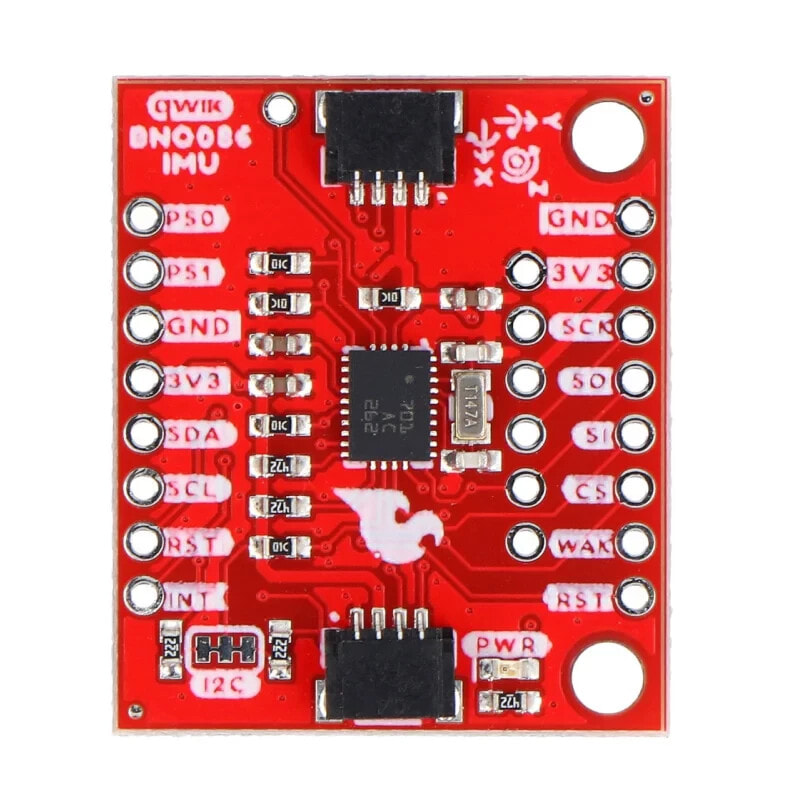
VR IMU Breakout - VR module with IMU sensor - BNO086 - Qwiic - SparkFun SEN-22857.
The module has two Qwiic connectors.
- VR module with integrated 3-axis accelerometer, gyroscope and magnetometer
- Equipped with an efficient, 32-bit ARM Cortex M0+ microcontroller
- Supports I2C, SPI and UART interfaces
- It can be implemented in Android mobile phones - so that the user can use VR glasses using the phone itself
- It is energy-efficient - it has low power consumption in idle state and has interactive calibration
- Acquires, analyzes and corrects data for drift, resulting in accurate IMU information
- It has Qwiic connectors enabling connection without the need to solder wires
Virtual reality (VR) is a technology that allows the creation of simulated environments using computers. T hey transport users to fully immersive, three-dimensional virtual worlds that can be both realistic and fantasy. It has wide applications, from entertainment in the form of e.g. video games, virtual trips, to education - training simulations, virtual lessons, as well as health (therapy, surgical training) or broadly understood business (product design, virtual meetings). The most well-known VR devices include VR glasses , which can be connected to a computer or game console, as well as stand-alone VR headsets, which do not require external computing sources.
The set includes only a plate - VR glasses and other accessories must be purchased separately.
The module is compact and lightweight.
- Module type: VR module with integrated accelerometer, gyroscope and magnetometer
- Microcontroller: ARM Cortex M0+
- Built-in IMU chip: BNO086
- Operating voltage range: 2.4V to 3.6V (3.3V via Qwiic connector)
- Communication interface: I2C bus, SPI, UART
- I2C: up to 400 kHz
- SPI: 3MHz
- UART 3Mbps
- Rotation vector:
- Dynamic error: 3.5°
- Static error: 2°
- GRV rotation vector
- Dynamic error: 2.5°
- Static error: 1.5°
- Dynamic heading drift: 0.5°/min
- Geomagnetic rotation vector
- Dynamic rotation error: 4.5°
- Static rotation error: 3°
- Gravity angle error: 1.5°
- Linear acceleration accuracy: 0.35 m/s 2
- Accelerometer accuracy: 0.3 m/s 2
- Gyroscope accuracy: 3.1°/sec
- Magnetometer accuracy: 1.4 µT
- I2C address: 0x4B (default), 0x4A (configurable)
- Pins: solder pads, 2x Qwiic connector
- Board dimensions: 25.4 x 30.48 mm
- Weight: 3 g
- Manufacturer's website: SparkFun SEN-22857
- User Guide
- System diagram
- EagleCAD files
- Plate dimensions
- BNO086 system
- Technical Documentation
- Migration guide
- Use guide - taring functions
- Hub sensor transport protocol
- Sensor calibration procedure
- Arduino library
- GitHub repository